電気流体力学と静電気力による推進装置
EHD推進機のホバーリング(空中における静止)について
2022年 6/10
2022年 10/1 追記
2023年 8/1 追記
2024年 5/24 追記
2024年 6/24 追記
2024年 11/20 追記
2024. 12.30 2025. 01.04
追記
古い情報は破棄していきます。
キーワード; 金属の分極、電荷、静電容量、電界、大気イオン密度、弱電離プラズマ
Keyword; EHD, Electrostaic, Propulsion, Charges, Capacitance, Polarization effect in Asymmetrical Metal Structure, Plasma
ここでは、EHD推進デバイスのホバーリング(空中での静止)について述べます。
装置はただ電圧印加のONとOFFを行っただけでは、上昇と下降しかしません。
達成したい目標は、EHD推進デバイスを任意の空間に滞空(ホバーリング)させることです。
EHDデバイスでは、できるかどうかわからないかなり困難なことです。私が知る限り、達成した人はいないでしょう。
羽根突きドローンだったら、プロペラの回転速度を遅くしたり早くしたり、ちょうど自重とつりあった回転速度が存在し、その周辺の回転速度でESCでコントロールできるんですが。。。今回はそうはいきません。
原理について、再考します。
浮上力の発生に関与しているのは、基本的に電界と電荷であり、今現在明らかになっていることは、金属板に電荷をためると非常に異常な現象(つまり浮上力)が生ずるということです。
では、同じ物体(金属体の装置)に電荷が蓄積されている部分とされていない部分を設けてはどうか?
それで、スイッチを入れることで電荷が蓄積されていない部分に電荷を蓄積すると、浮上力のコントロールが可能となります。
浮上力と重力の力積の足し算(仕事量=力 x 時間)をちょうど0にすれば、ホバーリングが実現できと推察されます。
2022.10.1 追記
上記の考えが正しいことを証明するため、実証試験を行いました。
以下、高度制御の実験結果です。CW出力テスラコイルで駆動するEHDデバイスにおいて、高さコントロールに成功しました。
方法として、CW出力テスラコイルの発振振幅をPWMでコントロールしました。
具体的には、テスラコイルの自励発振回路の制限抵抗の値を2値に変化させ、以下のようなイメージ
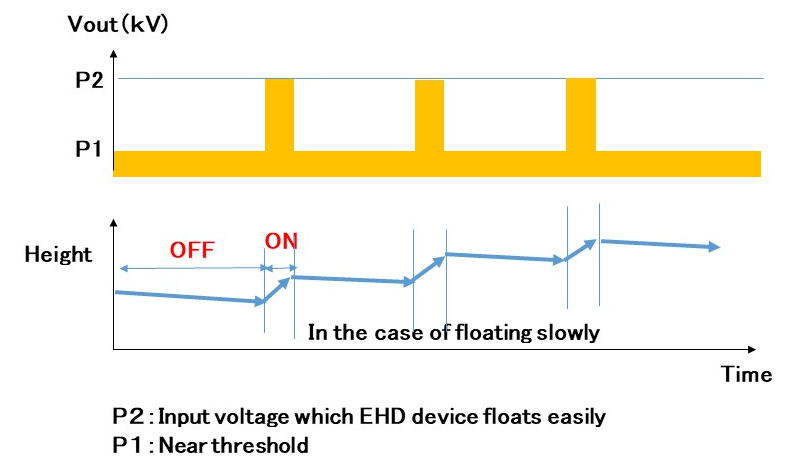
図、CW回路の出力電圧イメージ 横軸:時間、縦軸:CW回路の出力電圧
で、縦軸を出力電圧とした場合にPWMを利用して出力電圧を上記のように変調しました。
パルス繰り返し周波数: 3−10Hz
この繰り返し周波数は、CW回路の時定数を考慮した上限となります。
Duty: ここでは、0.1としました。 これを変化させることで高度が変化します。
FETを使用して回路をON、OFFして抵抗値を変化させました。
ゲートの入力信号には、パルス発生装置を用いました。
P1はEHDデバイスの重量と浮上力が釣り合う状態、P2は完全に浮上力がデバイスの重量を上回る状態です。
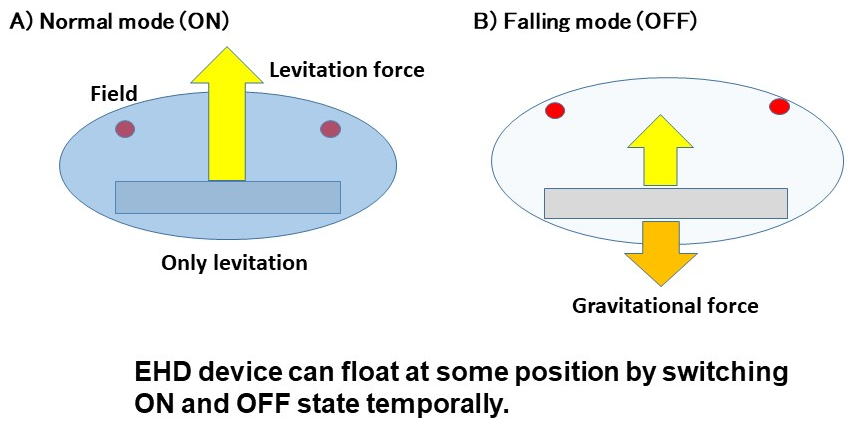
図 ホバーリング制御
うかないおもりの状態と重力に対して浮く状態を繰り返す。
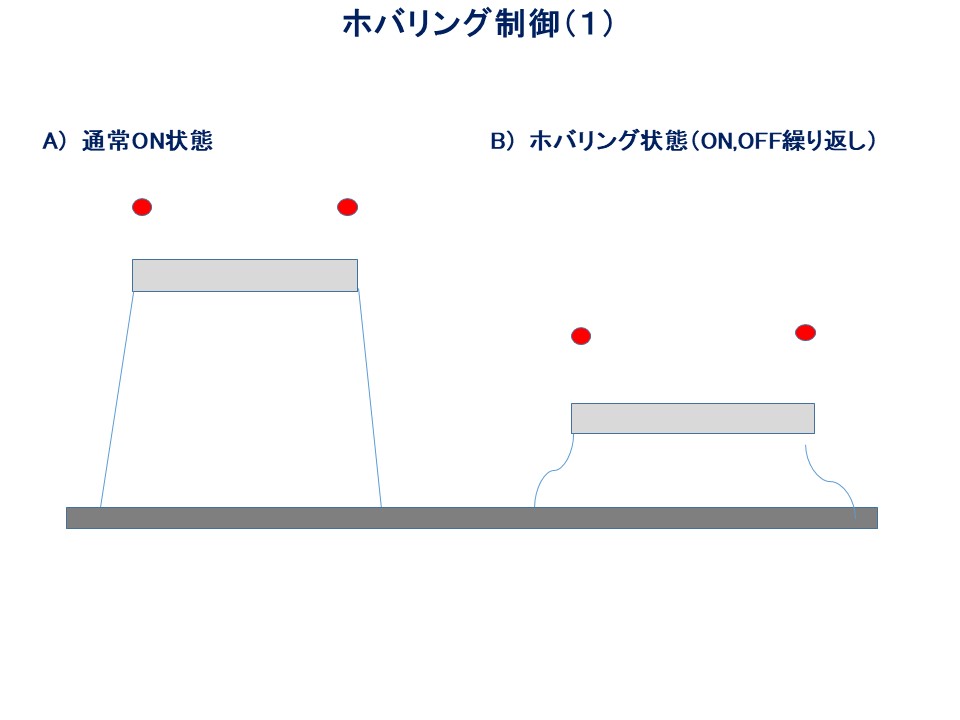
図 ホバーリング時の高さの変化
2023. 8.1 追記
高度制御の追加実験を行った。
パラメータ
装置サイズ: 40 cm 三角形
パルス繰り返し : 10Hz
Duty:適当 FETでのON・OFF制御
EHDデバイスの飛行高度の制御実験を行った結果、デバイスを任意の空間に滞空させることに初めて成功しました。
2024. 5.24 追記
円形3Dタイプの実験
大型のEHDデバイスを使用
以前のタイプは、単純に面構造 2D構造でした。 今回、上下の面構造を採用し、3D化を行いました。
その結果として、安定性の改善が確認できました。
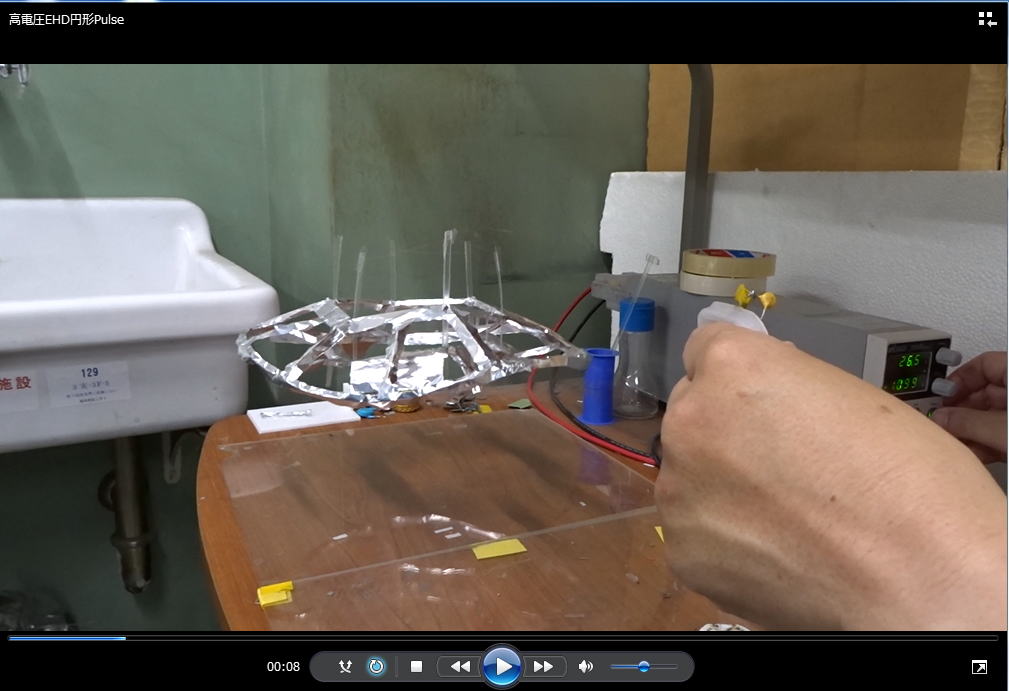
高度制御実験2 動画
パラメータ
装置サイズ 30 cm 円形
パルス繰り返し : 10Hz
Duty: 0.8 FETでのON・OFF制御
2024. 6.24 追記
円形3Dタイプ
制御法の大幅改善 CVの導入
発振回路の直前にマイコンで制御可能なFET電流制御回路を挿入して、発振出力電圧の制御を行うように改良しました。
現在マイコンにラズベリーパイ4Bを採用し、カメラを取り付けCVによる制御を導入しました。
パラメータ
装置サイズ 30 cm 円形
パルス繰り返し : 10Hz
Duty: 75-100%
25/30 1秒サイクル制御。
2024.11.19 追記

2024.11.19 円形小型 側面ストライプ電極 20cmφ
円形小型 実験動画_高度制御
制御法の改善その2
発振回路の直前にマイコンで制御可能なFET電流制御回路を挿入して、発振時間制御を行うように改良しました。
前の方式では、いろいろ欠陥がありました。
今回、PWM制御の改善を行った結果、スムーズに浮上高さを制御できるようになりました。
動画を上にアップします。確認してみてください。
Duty比により、段階的に高さが変化しています。
どうしてDutyにより高さが変わるのか、ここ未解明の部分で今後詳細について調べていく必要があります。
2024. 12.30−2025. 01.04 追記
PWM制御による高度のコントロールについて

図、高さ変更が可能となる空間領域(3領域)
1番下 EHD推進デバイスが重力にトラップされる状態。
EHD推進デバイスは、自重の方が浮上力よりも大きく、地面に引き寄せられる。
2番目 EHD推進デバイスの浮上力と重力がちょうど釣り合う高さが存在(緑色の領域)
3番目 EHD推進デバイスが重力から逃れ、どんどん上昇する。
重力のトラップ(重力井戸)から完全に抜け出す。
図は、PWM方による高さが変更可能であることの理由を示した図である。
緑色は、仮想的な粒子濃度(はっきりとわかっているわけでなく、あくまで仮定です。)
EHD推進デバイスには、浮上力と重力が同時刻にかっている。
その高さの関数となっている浮上力と重力が自動的に均衡することにより、ある特定の高さにEHD推進デバイスが固定できる
ものと考えられる。
なぜ反発力が生まれるか?それは、実効的な負の質量モーメントのようなものが存在。
これは、印加電圧、つまり、電界強度依存特性があり、高いと負の質量モーメントが大きくなる。
アナロジーとして、2つ磁石が存在し、N極とN極が反発して片方が地面にくっつき、片方は空中に浮いている。
磁石には重力がかかっており、距離により磁力は変化するものとする。高さは、重力と磁力の反発力がちょうどつり合う場所となる。
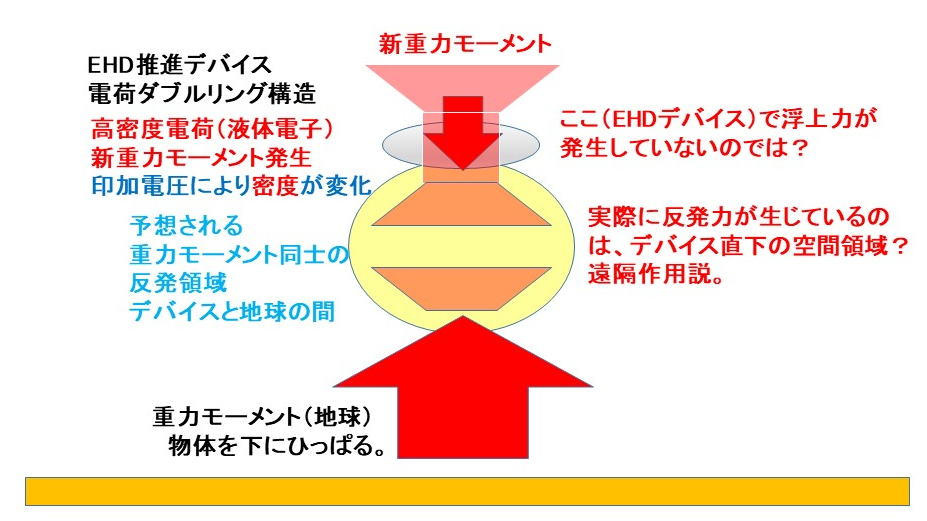
図2、真実の原理?
ここでは、力の遠隔作用説を提唱する。 EHDデバイスの電界分布のアンバランスでなく、
実際にはEHDデバイス中心から下にかけての空間で浮上力が発生していると考える。
浮上力の原因は何か?
電界説を否定
地球は大きな電荷をもつ物体であり、空から地上まで巨大な電圧がかかる。電界とは静電界である。
しかし、電極の正負を変えても、浮上する向きは変わらず、2重リングの上下のみに依存している。
電界を印加してから力が最大になるまで時間がかかる。0.1秒。
磁界説を否定
地球は巨大な磁石 北極がN、南極がS 北極から南極にかけて横方向に磁界がかかっているが、微弱すぎる。
EHDデバイスにはリング状の磁界が発生するが、それと水平方向の磁場が作用するか?無理だと思う。
見かけ上、電界のみがかかっているので通常我々は、電界のファラデー応力のアンバランスと考えがちであるが、
間違ってはいけない大事な証拠、何か?Optical-flow 解析によって明らかになった証拠は、電界を印加後、すぐに力が発生するのでなく、
0.1秒というタイムラグが存在するということ。明らかに電界でない何かが力を発生させている証拠であり、電界で直接浮上力が発生していないという考えに至った理由である。
参考文献
Taku Saiki, “Control of Altitude and Acceleration in Direction of Gravity for Ehd and Electrostatic Propulsion Devices”, viXra.org e-Print archive, viXra:2308.0123, 2023 Aug. 18th, 8page. https://vixra.org/abs/2308.0123
